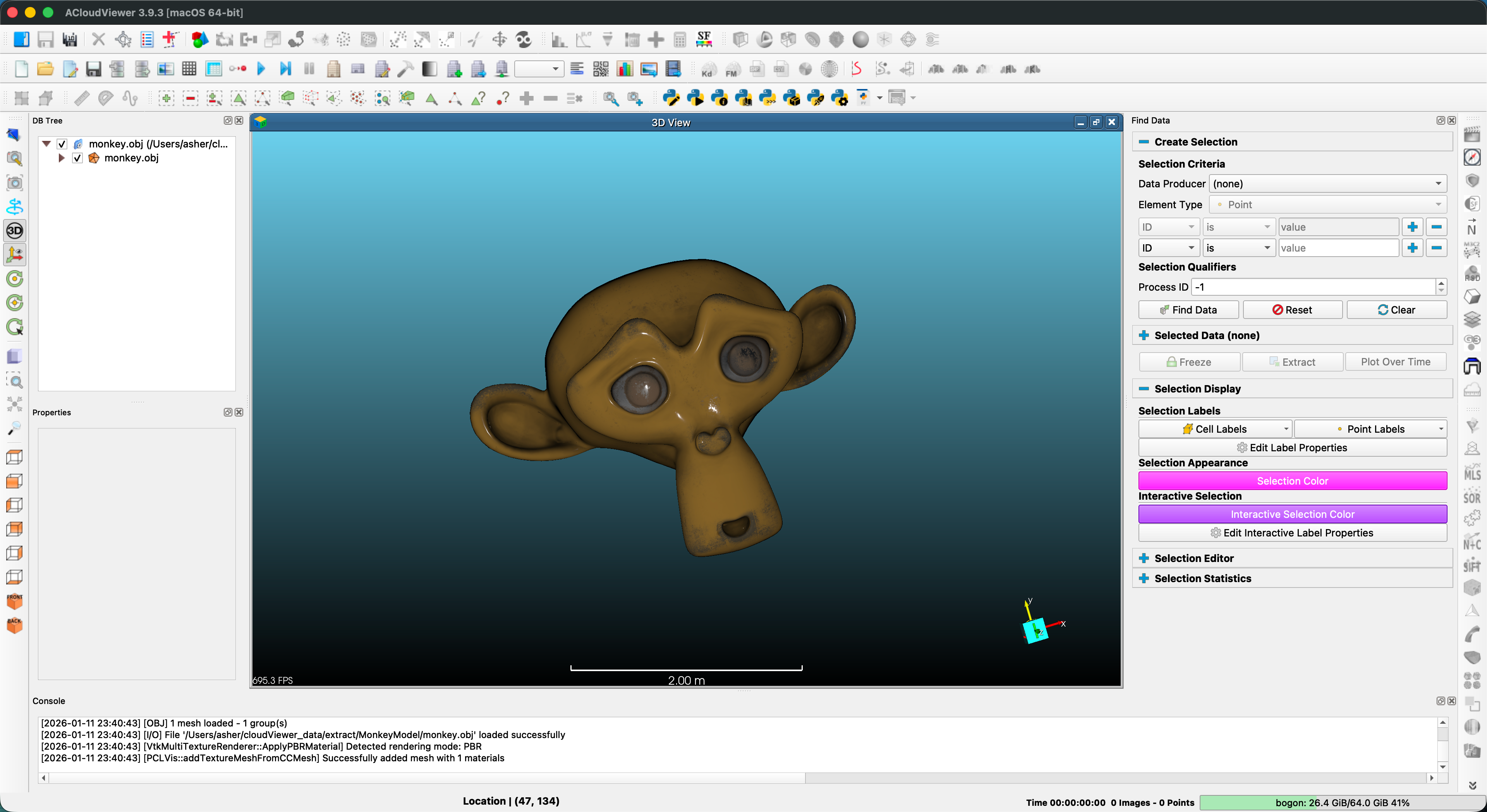
About ACloudViewer
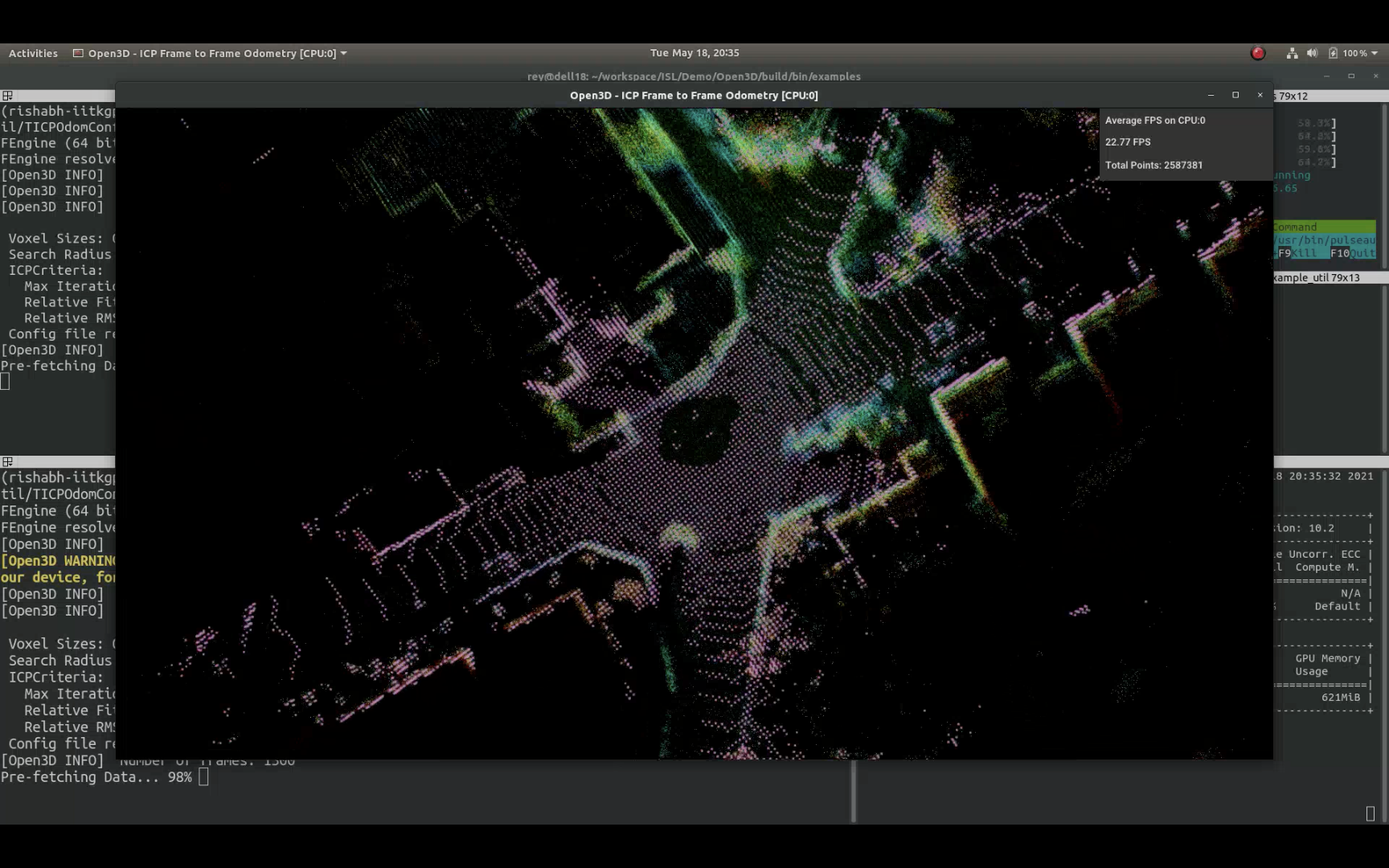
ACloudViewer is an open-source 3D point cloud and triangular mesh processing software library. It supports rapid development of software for processing 3D data, highly based on CloudCompare, Open3D, ParaView and COLMAP, and integrates the PCL library.
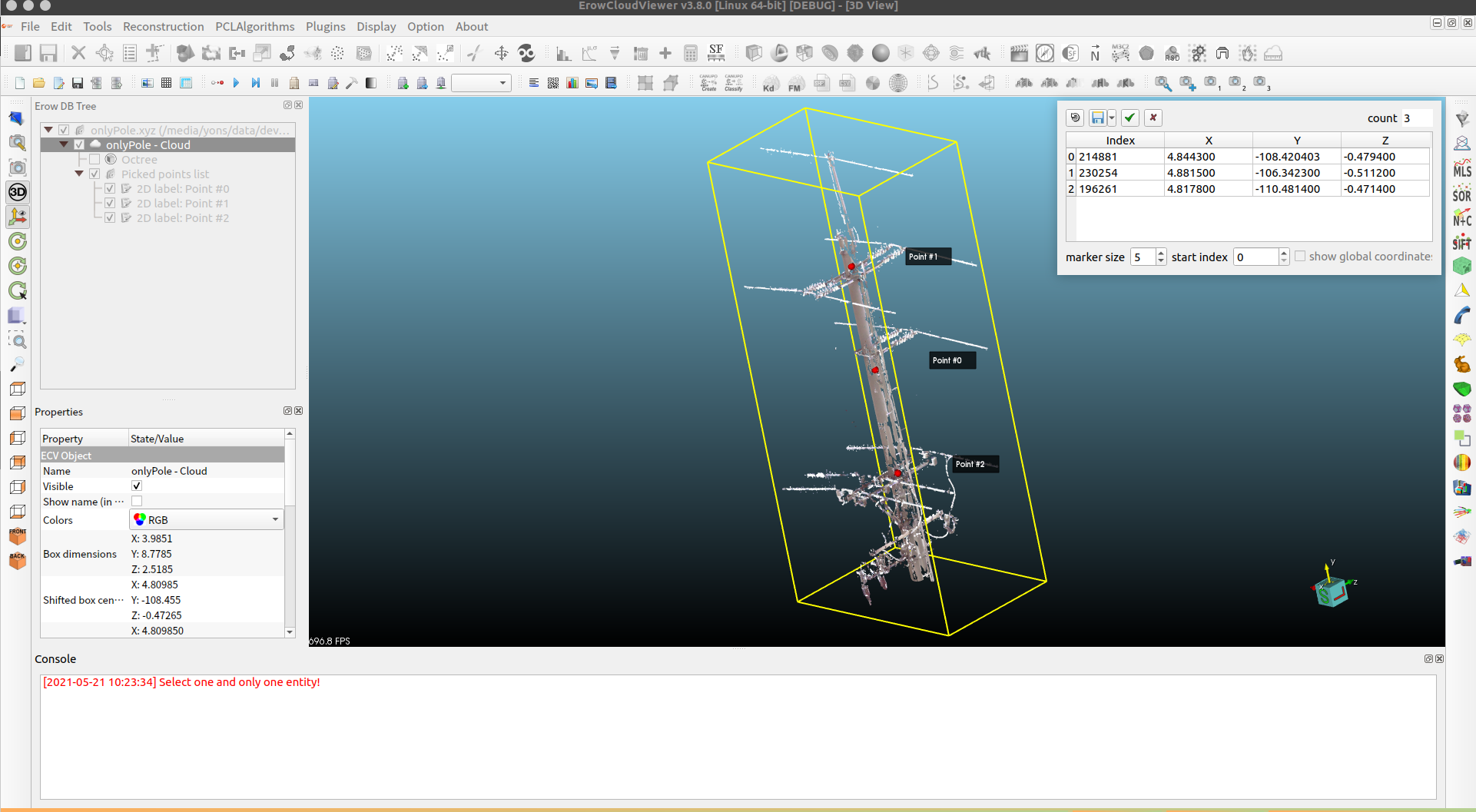
Originally designed to compare two 3D point clouds (such as those obtained by laser scanning) or the difference between point clouds and triangular meshes. It relies on an octree structure highly optimized for this specific use case, capable of handling massive point cloud data (typically over 10 million points, up to 120 million points with 2GB memory).